I do not like “wide-AIO” designs, because i use neck strap (i’m pincher, converted from thumber ~4 years ago), screen is hanging way too low. Looking-down position is very bad for neck, 20min. flight is “enough” for entire day - and holding TX “high-enough” is not comfortable.
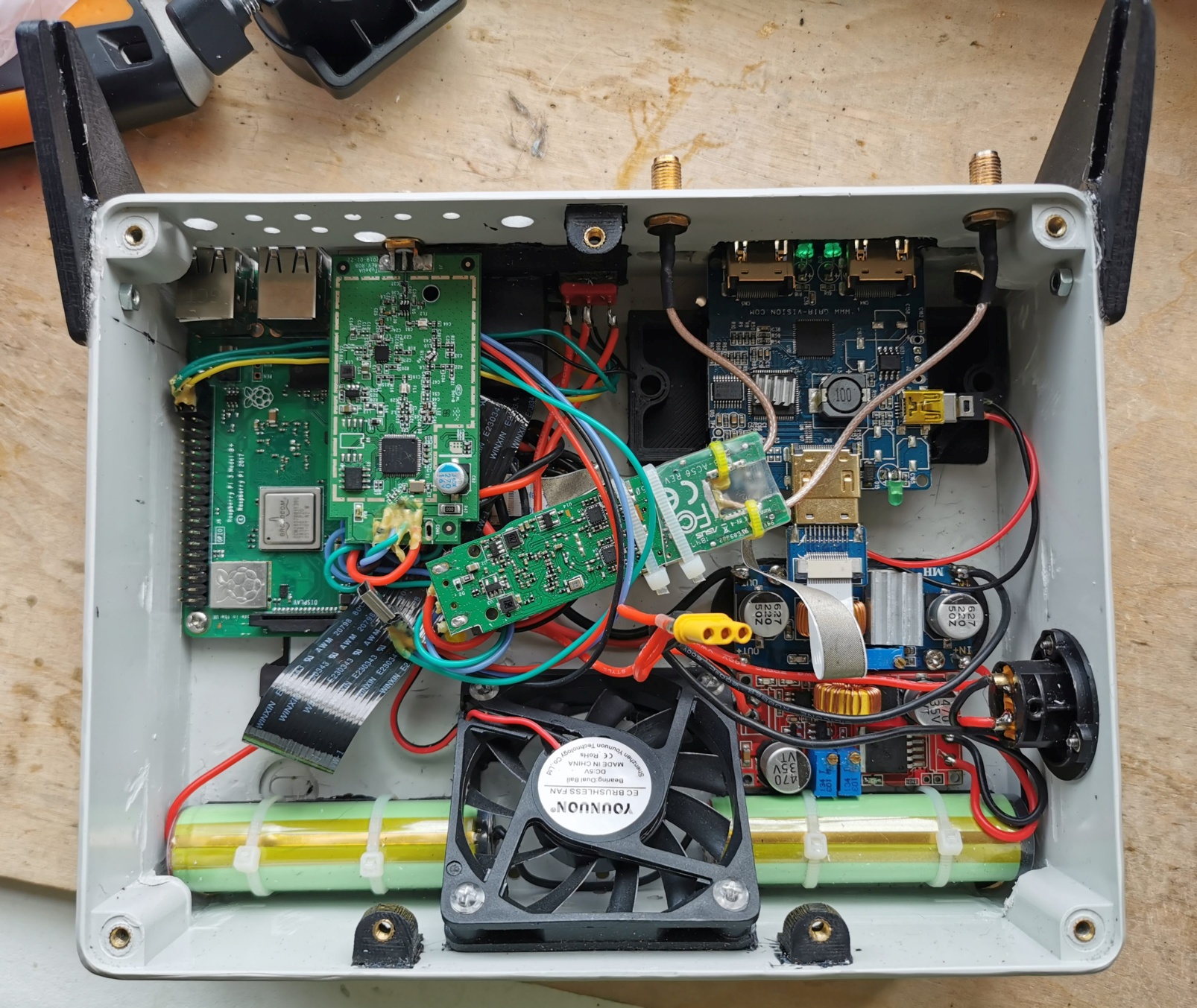
So i took cheap junction enclosure box (~6€, google can find it if you look for “009 PL IP65 190X145X70(28)”), 3D printed some parts for mounting and… It’s done.
Now it has:
- SmartSync switch
- 2.4/5.8G switch (Alfa NHA in small form factor/ASUS AC56)
- 2CH HDMI out (was 4ch before but board died for some reason so swapped with another 2CH)
- 2x Panasonic NCR18650B with charger (also works from external battery while charging at the same time)
- Good enough strap mount (it won’t last long, i know, carbon is worse than steel plate, but should be good for ~2 years)
- silent cooler (not temperature controlled, yet, maybe later - but it’s not loud)
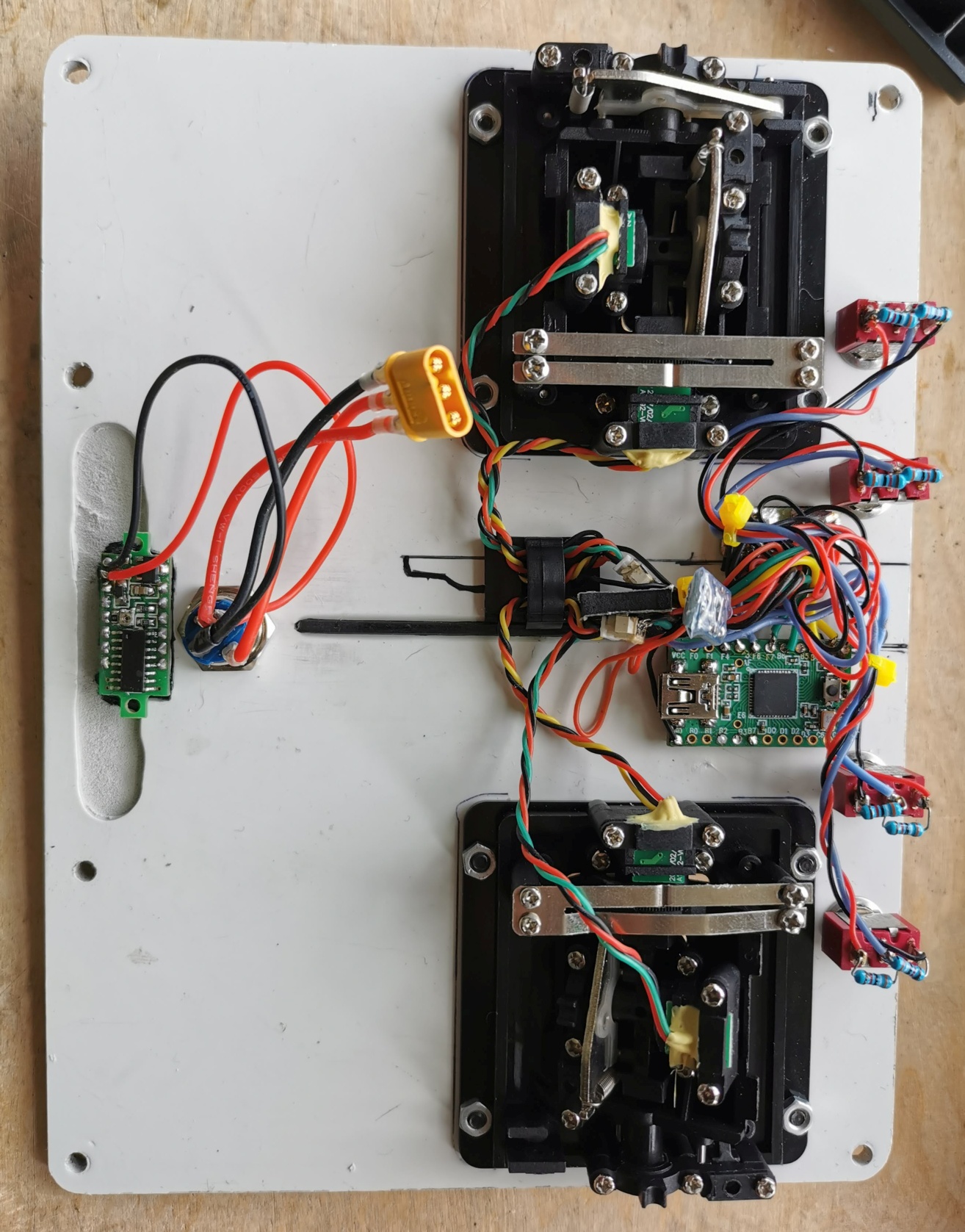
- Taranis hall gimbals (M9), connected to teensy 2 - using mmjoy
- 4* 3-pos switches (8CH in total)
- Direct mount for Samsung T710 tablet (which is old and slow, but has good screen, readable in sunlight - i also use it for other tasks on field)
- Super-duper gimbal, switch and tablet mount protector made from pink HDPE, adds 37 bonus amaze points

Best of all - it’s very simple. It does not require large parts to print, it is very stiff (top alone is mounted with 7 bolts to bottom), it has enough space inside for some expansion (maybe USB HUB and DVR) and it “fits into hands” good enough (If compared to Horus X10S, which is “best fit” IMO - this is not so great, but acceptable, esp. when not used for racing, feels like something between Turnigy 9XR and Taranis X9D).
Photos:






Now about bad things:
- I got “Locked to GB region” Alfa NHA cards (also “tube” version used inside this device), which means that with current regulatory.bin has output power between 28 and 40mW (using custom regulatory.bin outputs > 100mW of power but re-generating custom DB for every release is meh), so range is not so great - smth like 2km with omni antennas with “quality settings”, ~5km max (there is directional antenna mount, but then setup becomes bigger…)
- 2.4G setup is extremely sensitive to anything around. It works well if i fly alone in field, but becomes unusable in any FPV meeting or with other flyers. NHA cards do not use narrow band input filters, so even if you use something like 2.3/2.5G (far, far away from ISM frequencies) - any phone with wifi turned on (no need for hotspot), any bluetooth, any remote - literally anything not in airplane mode - will kill your range up to being unusable 100m away. Avoid 2.4G if you fly in groups.
- Remote + INAV is unreliable. It is much better when used without diversity - RX and TX range is comparable, but still it goes into desync sometimes (requiring ground-side reboot while in flight!!!). INAV modes display does not work properly - they are mixed, but this is not big problem, sometimes mode display stuck in manual, for example, while there are several other modes enabled and so on. But this is not big deal, just hide display mode and that’s all - real man fly in acro-only anyway

- Remote has close to 1s delay, at least on 2.4G band and any interference increases it even more. It’s not uncommon to see controls reacting with 5s++ delay in air. For “straight-long-range” flight this may be acceptable, but if you plan to fly “fast and low” without AP - forget it
- Should put 4x batteries instead of 2x - tried to save weight, but now two batteries last ~2 hours, if using tablet (tablet charges via USB), which is not enough for long range flights. Good thing that i can just plug any 2-6S battery and keep flying while recharging at the same time
- mmjoy “fixed-calibration” mode does not work properly, so need to work with all switches/sticks on every power-on. Maybe i fix this one day with extreme joystick…
- There’s no proper DVR inside. Should record via tablet, when flying with tablet, or plug-in USB stick, when flying with HMD, both require manual interaction, which is bad (also no OSD overlay). DVR should be in “always-on” mode, like on analog systems - you never know what could happen and when you will need video to find lost model. My current DVR can be automated (simple digispark board with attiny and supercap => easy power-on and off), but is a bit too big to fit inside. Maybe i can find another, smaller.
5.8G is not tested for range, building another quad for that, maybe many issues present on 2.4G will disappear. Anyway, switching between bands is easy (at least on TX side) - one switch, reboot and fly!
Maybe this will be usefull for someone or can take few ideas from there. I can share STL files if someone wants to replicate entire design…